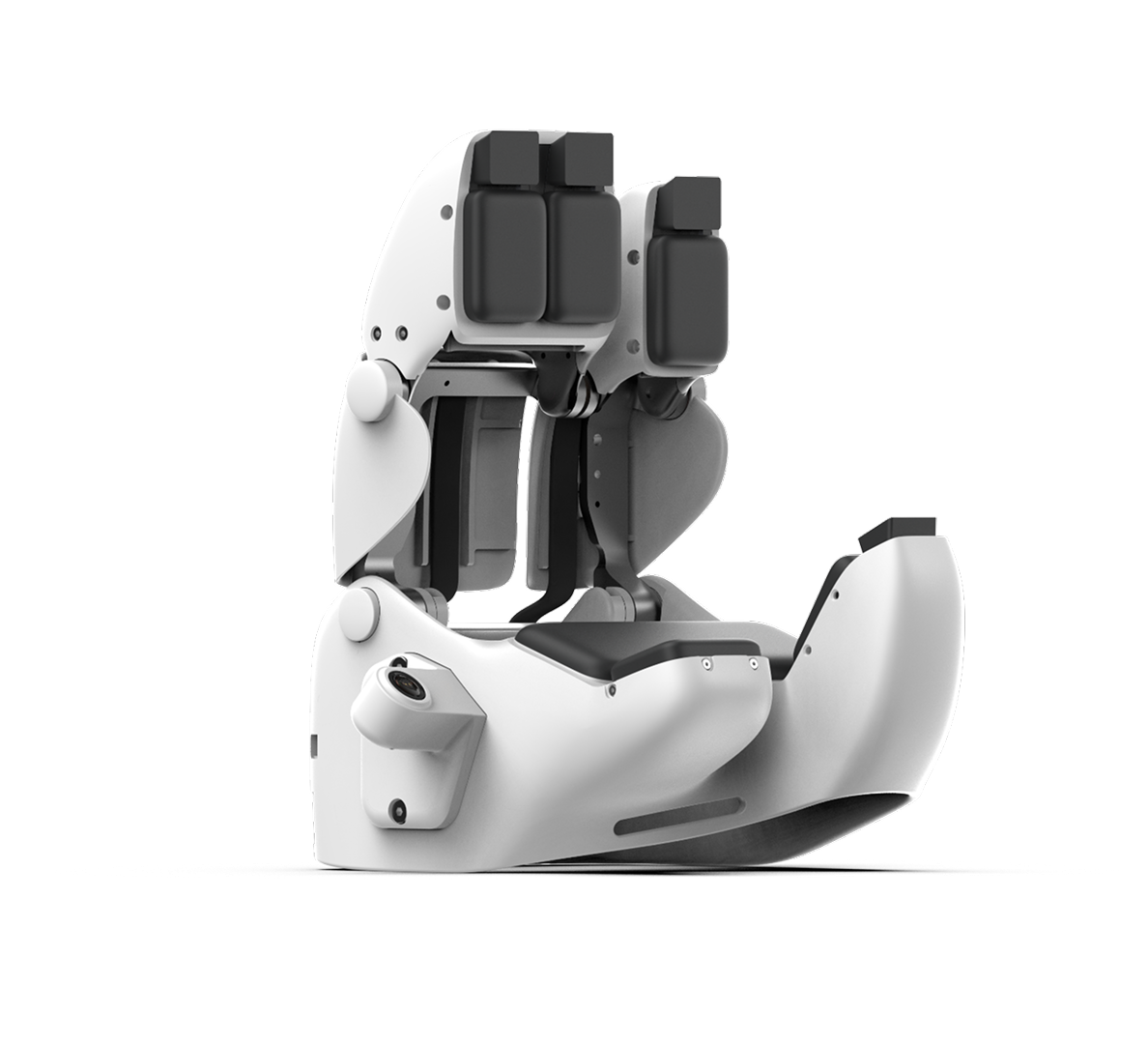
PXCap III
三指数据采集手套
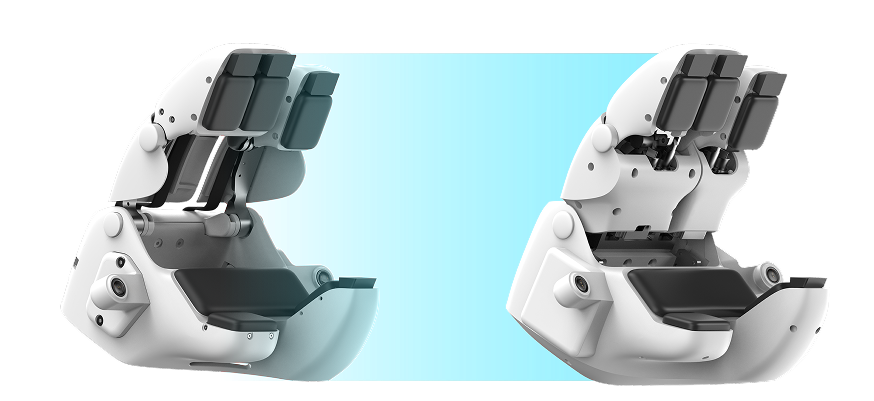
采集-执行双末端同构
1:1物理同构、 全域高精度触觉感知 、自研高精度抗磁编码器
PXCap III x PXDex III
采集-执行双末端同构
触觉、视觉,自体感知全模态联合对齐,实现手套动作与末端执行等效映射。
1:1物理同构,采集即部署,避免跨构型精度损耗
传感器布局、运动学连杆、关节自由度以及视觉观测完全一致,零映射损失
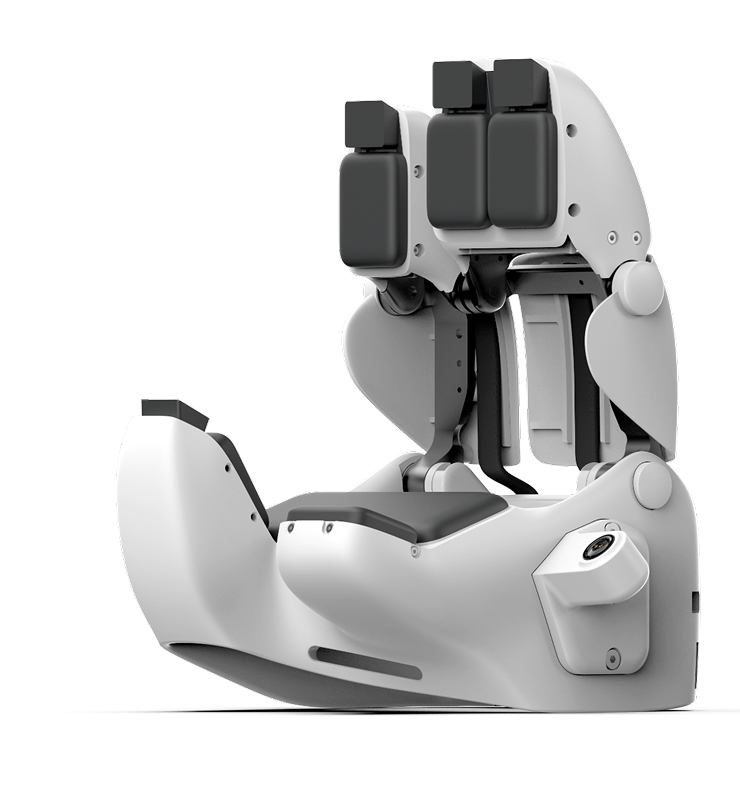
全域触觉感知
指尖、指腹、掌心无盲区覆盖

高精度姿态捕捉
搭载自研全球最小抗磁编码器,保障复杂环境下高精度采集
场景优化设计
围绕实用场景进行深度交互体验构建
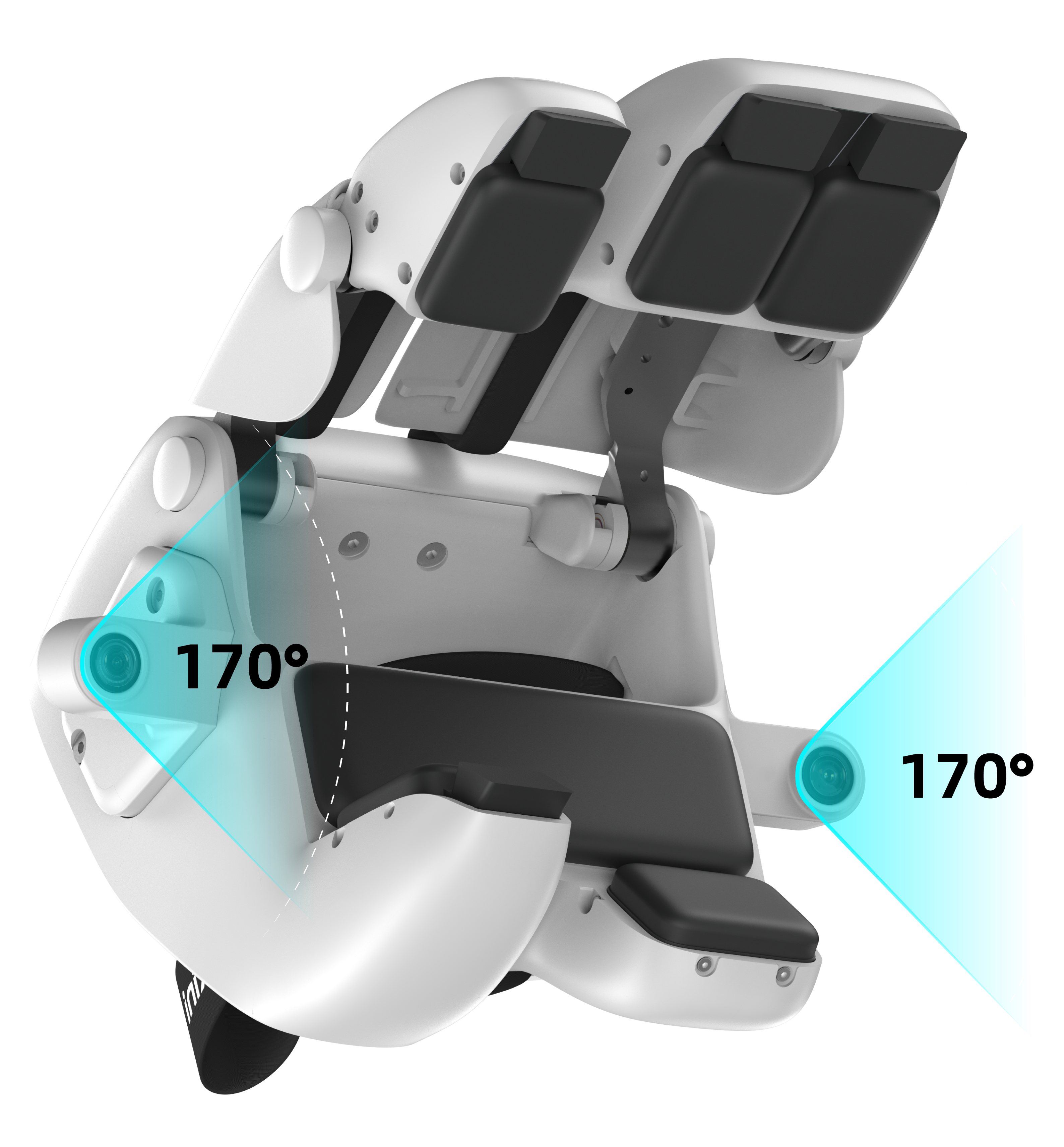
掌心双侧170°超大视角相机
PXCAP III 三指数据采集手套
重量
650g
自由度
4
触觉感知能力
帕西尼6D霍尔阵列触觉传感器
触觉力传感器精度
0.1N
触觉数据类型
合力、分布力阵列
关节角度感知能力
帕西尼自研高精抗磁编码器
角度编码器精度
± 0.15°
相机
RGB*2
相机视野
D170°
相机分辨率
1080 p
相机帧率
30 fps
最大抓握直径
55 mm
最小捏取直径
2 mm
供电
12V DC
腕部定位方案
VR头显 + 手柄,支持其他定位方案
腕部定位精度
≤ 5 mm(VR头显+手柄)
空载开合寿命
100万次
对外通讯
USB
*数据源于帕西尼感知科技实验室
PXCap III
三指数据采集手套
采集-执行双末端同构
1:1物理同构、 全域高精度触觉感知 、自研高精度抗磁编码器
PXCap III x PXDex III
采集-执行双末端同构
触觉、视觉,自体感知全模态联合对齐,实现手套动作与末端执行等效映射。
1:1物理同构,采集即部署,避免跨构型精度损耗
传感器布局、运动学连杆、关节自由度以及视觉观测完全一致,零映射损失
全域触觉感知
指尖、指腹、掌心无盲区覆盖
高精度姿态捕捉
搭载自研全球最小抗磁编码器,保障复杂环境下高精度采集
场景优化设计
围绕实用场景进行深度交互体验构建
PXCAP III 三指数据采集手套
重量
650g
自由度
4
触觉感知能力
帕西尼6D霍尔阵列触觉传感器
触觉力传感器精度
0.1N
触觉数据类型
合力、分布力阵列
关节角度感知能力
帕西尼自研高精抗磁编码器
角度编码器精度
± 0.15°
相机
RGB*2
相机视野
D170°
相机分辨率
1080 p
相机帧率
30 fps
最大抓握直径
55 mm
最小捏取直径
2 mm
供电
12V DC
腕部定位方案
VR头显 + 手柄,支持其他定位方案
腕部定位精度
≤ 5 mm(VR头显+手柄)
空载开合寿命
100万次
对外通讯
USB
*数据源于帕西尼感知科技实验室
 邮箱
邮箱 地址
地址 0755-23574593
0755-23574593