多维触觉灵巧手
丰富触感赋能灵巧力控
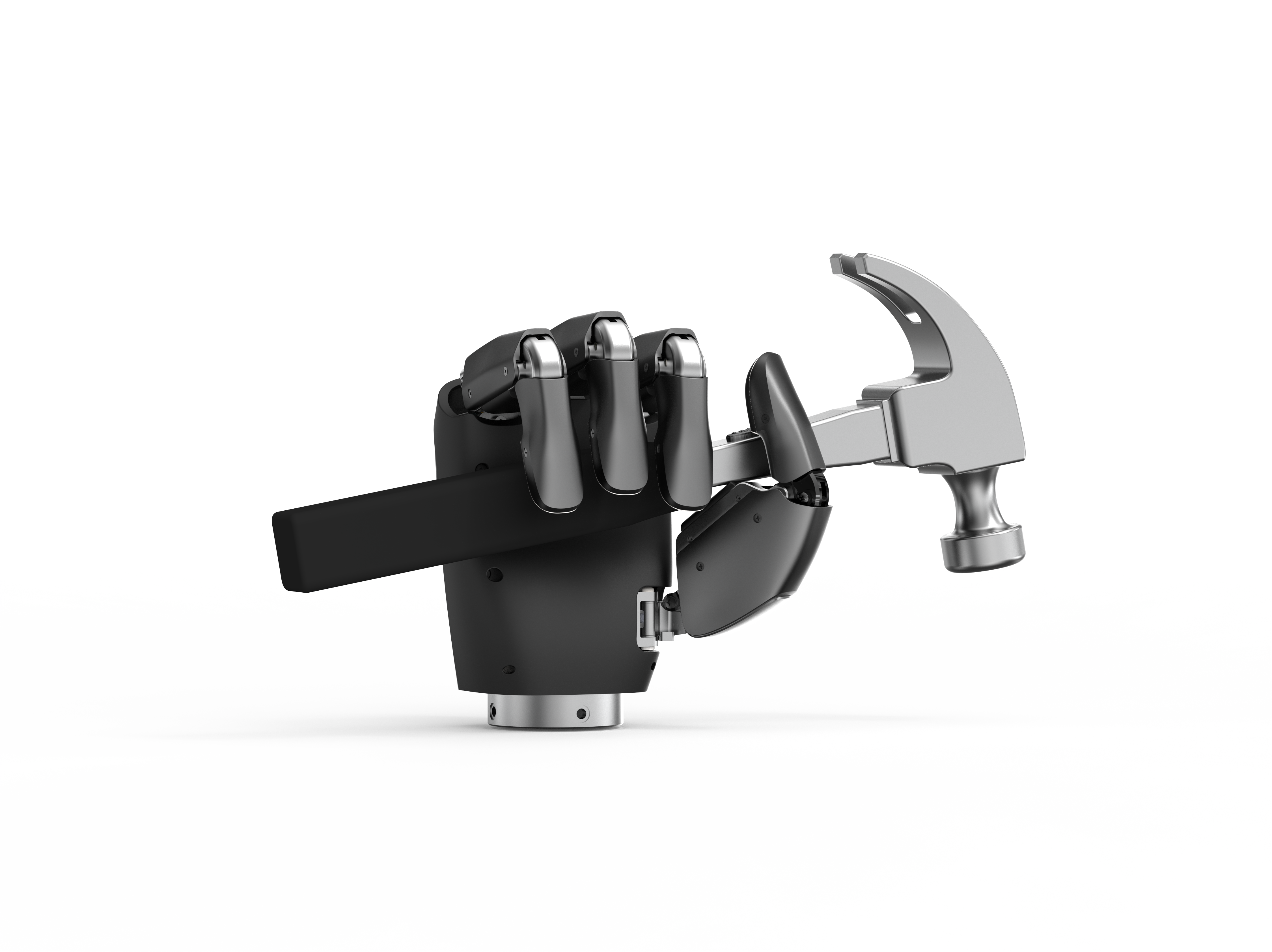
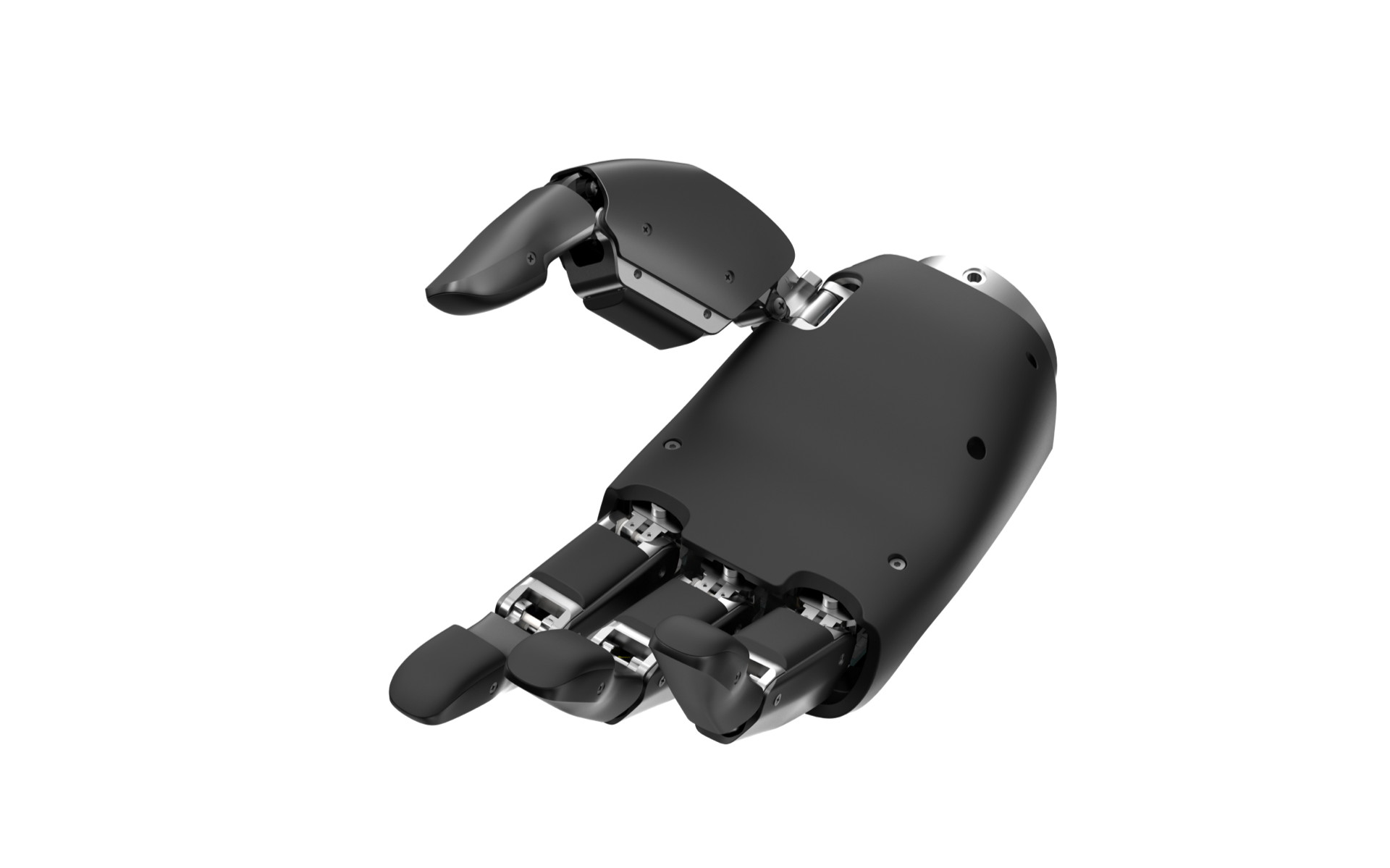
仿生结构设计
多关节、多自由度设计,灵巧生动
完美模拟人手的抓取、旋转、拿捏等各项复杂动作
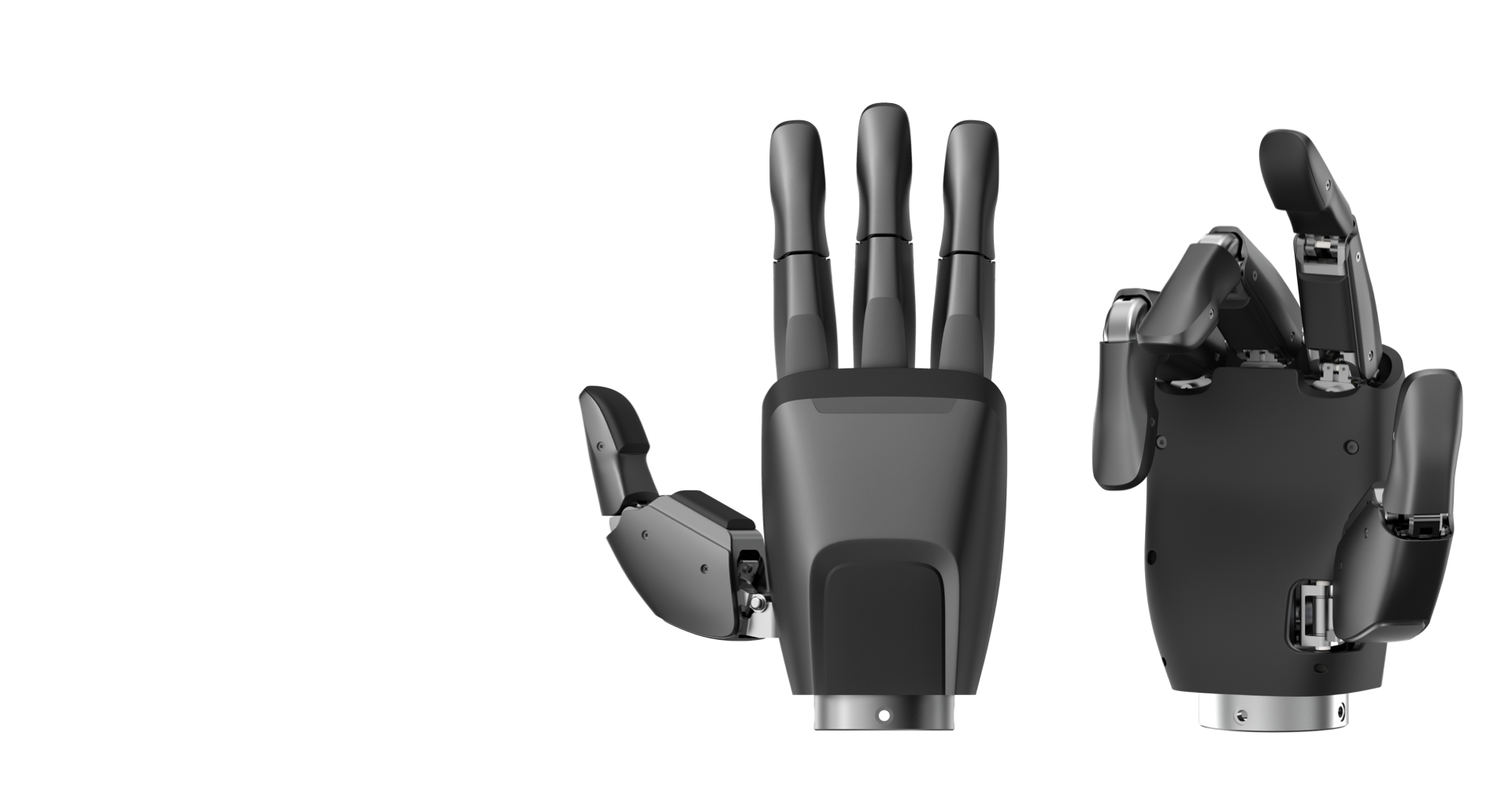

单手集成528颗ITPU多维触觉传感单元

轻量化结构设计
创新融合轻量化高强度复合材料与仿生结构设计,轻巧灵活
强大的负载能力
单手最大的负载能力高达4kg,稳定可靠,为多场景高强度连续作业提供强大保障

产品参数
手指数量
4
主动自由度
5
总自由度
9
触觉感知能力
528 个 ITPU 触觉感知单元
负载
4 kg *
最大抓握直径
10 cm *
最小开合时间
1 s *
驱动方式
空心杯电机驱动
抓取方式
握、捏、按等人手基础动作
通信方式
EtherCAT / Modbus
*数据源于帕西尼感知科技实验室
DexH5
多维触觉灵巧手
丰富触感赋能灵巧力控
仿生结构设计
多关节、多自由度设计,灵巧生动
完美模拟人手的抓取、旋转、拿捏等各项复杂动作

机器人多维触觉感知
单手集成528颗ITPU多维触觉传感单元
0.1N 精准力控
搭载先进的力控技术,赋予指尖灵巧力控能力,解锁更多精细操作场景
轻量化结构设计
创新融合轻量化高强度复合材料与仿生结构设计,轻巧灵活
强大的负载能力
单手最大的负载能力高达4kg,稳定可靠,为多场景高强度连续作业提供强大保障
产品参数
手指数量
4
主动自由度
5
总自由度
9
触觉感知能力
528 个 ITPU 触觉感知单元
负载
4 kg *
最大抓握直径
10 cm *
最小开合时间
1 s *
驱动方式
空心杯电机驱动
抓取方式
握、捏、按等人手基础动作
通信方式
EtherCAT / Modbus
*数据源于帕西尼感知科技实验室