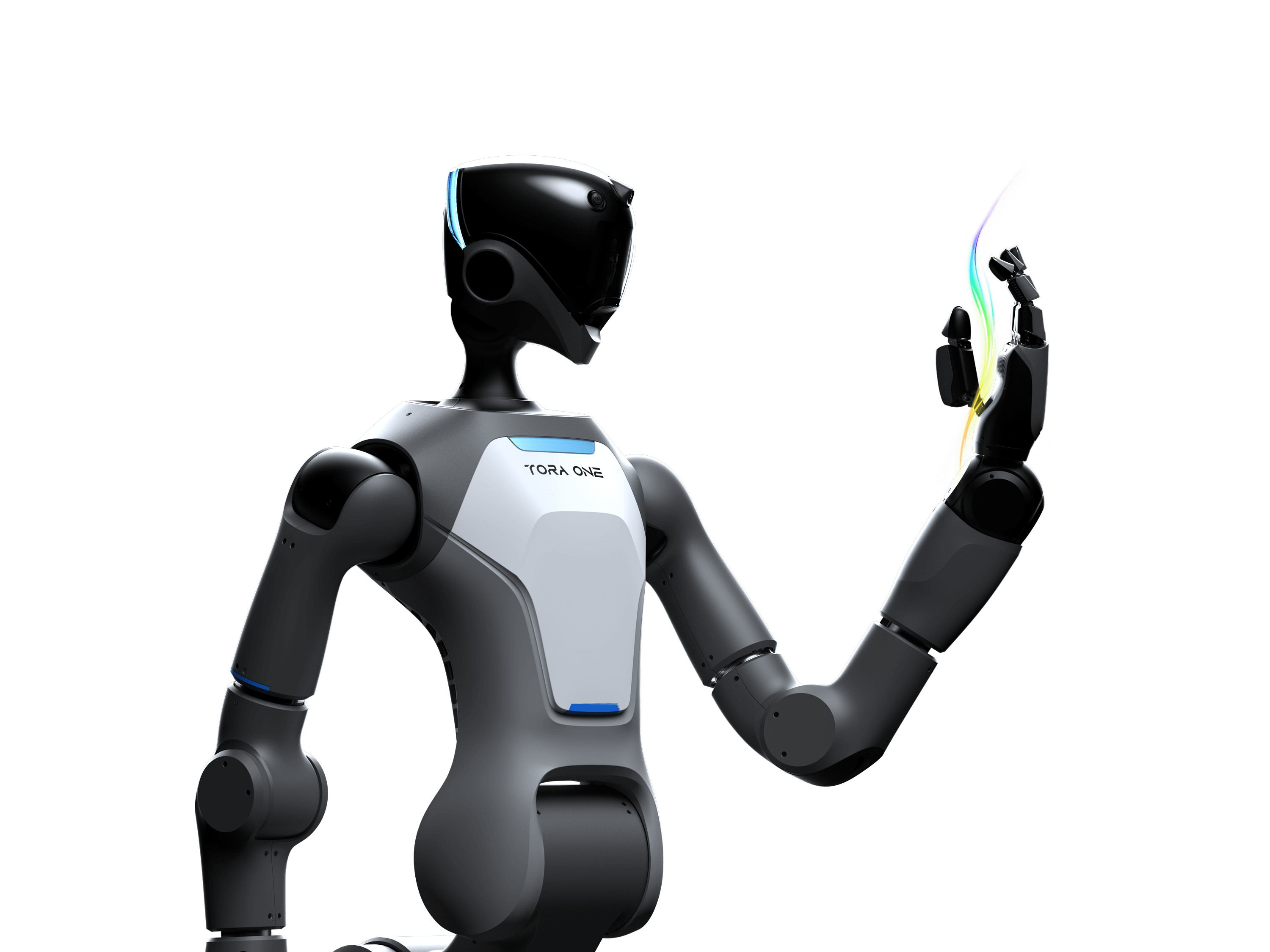
TORA ONE
The First Multidimensional Tactile Humanoid Robot in Embodied AI industry
Connecting to a better future with a rich sense of touch at fingertips
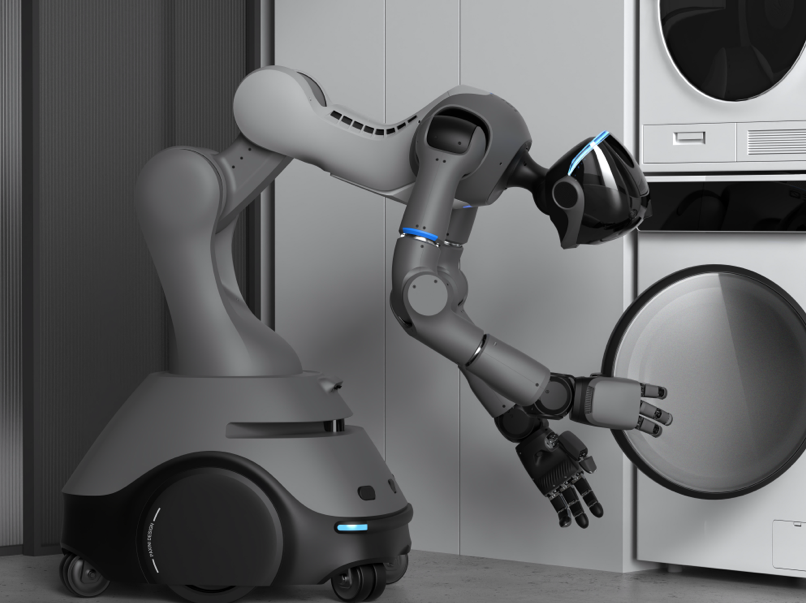
Integrated Tactile-Visual Dual-Modal Hexterous Hand
The industry's first integrated multidimensional tactile and AI vision dual-modal dexterous Hand Precise sensing, dexterous operation
High-Precision Multidimensional Tactile Sensing
2280 self-developed high-precision ITPU multidimensional tactile sensing units, 15 types of multidimensional tactile sensing, 6840 tactile signals
360-degree environmental detection, full-scene security without worries
Equipped with advanced SLAM navigation technology and LIDAR system, integrated with 5 HD cameras and 2 depth cameras, 360-degree all-around environment depth detection, safety and worry-free, for the flexible operation of each scene to escort
TORA ONE
1.46m-1.86m
Dynamic adaptive height
53
Degrees of freedom of the body
0.01N
High-precision force control
Precise force control at fingertips
8h
Battery life
Extremely long battery life
VTLA-Model:Visual-Tactile-Language-Action
Multimodal Model
All-round environmental perception
6D position recognition and grasping of objects
Operational capability
Precise and flexible operation
Application Scenarios
Warehousing Logistics

Medical and Health Care

Industrial Manufacturing

Commercial Scenarios

Home Services
Product Parameters
Height
Deformable structure, waist folded 1.46 m, extended 1.86 m
Body Degrees of Freedom (excluding dexterous hands)
21
Bimanual Degrees of Freedom
32
Number of Fingers on Each Hand
4
Dexterous Hand Degrees of Freedom ( single hand )
16 DOF( 13 active + 3 passive )
The Driving Mode of Dexterous Hand
Coreless motor
Tactile Perception
2280 ITPU multi-dimensional tactile sensing units
Number of Tactile Signals
6840 channels
Visual Capacity
5 RGB cameras ( 3 in head + 1 in each hand ) + 2 RGBD cameras ( 1 in head + 1 in chassis )
Arm Repeat Positioning Accuracy
±0.5 mm
Single Arm (including dexterous hand) Straight-Arm Load Capacity
Rated 5 kg
Single Arm (including dexterous hand) Maximum Reach
96.5 cm
Chassis Specifications
Maximum moving speed 0.6 m/s, maximum turning speed 0.4 rad/s, repeatability accuracy 1.5 cm, absolute accuracy 3 cm, heading angle error 3 degrees, obstacle crossing height 2 cm, ditch width 2 cm, climbing angle 7 degrees
Navigation Method
Laser SLAM autonomous navigation
Battery Capacity
40 Ah
Charging Time
6 h
Endurance
8 h
TORA ONE
The First Multidimensional Tactile Humanoid Robot in Embodied AI industry
Connecting to a better future with a rich sense of touch at fingertips
Integrated Tactile-Visual Dual-Modal Hexterous Hand
The industry's first integrated multidimensional tactile and AI vision dual-modal dexterous Hand Precise sensing, dexterous operation
High-Precision Multidimensional Tactile Sensing
2280 self-developed high-precision ITPU multidimensional tactile sensing units, 15 types of multidimensional tactile sensing, 6840 tactile signals
360-degree environmental detection, full-scene security without worries
Equipped with advanced SLAM navigation technology and LIDAR system, integrated with 5 HD cameras and 2 depth cameras, 360-degree all-around environment depth detection, safety and worry-free, for the flexible operation of each scene to escort
TORA ONE
1.46m-1.86m
Dynamic adaptive height
53
Degrees of freedom of the body
0.01N
High-precision force control
Precise force control at fingertips
8h
Battery life
Extremely long battery life
VTLA-Model:Visual-Tactile-Language-Action
Multimodal Model
All-round environmental perception
6D position recognition and grasping of objects
Operational capability
Precise and flexible operation
Application Scenarios
Warehousing Logistics
Medical and Health Care
Industrial Manufacturing
Commercial Scenarios
Home Services
Product Parameters
Height
Deformable structure, waist folded 1.46 m, extended 1.86 m
Body Degrees of Freedom (excluding dexterous hands)
21
Bimanual Degrees of Freedom
32
Number of Fingers on Each Hand
4
Dexterous Hand Degrees of Freedom ( single hand )
16 DOF( 13 active + 3 passive )
The Driving Mode of Dexterous Hand
Coreless motor
Tactile Perception
2280 ITPU multi-dimensional tactile sensing units
Number of Tactile Signals
6840 channels
Visual Capacity
5 RGB cameras ( 3 in head + 1 in each hand ) + 2 RGBD cameras ( 1 in head + 1 in chassis )
Arm Repeat Positioning Accuracy
±0.5 mm
Single Arm (including dexterous hand) Straight-Arm Load Capacity
Rated 5 kg
Single Arm (including dexterous hand) Maximum Reach
96.5 cm
Chassis Specifications
Maximum moving speed 0.6 m/s, maximum turning speed 0.4 rad/s, repeatability accuracy 1.5 cm, absolute accuracy 3 cm, heading angle error 3 degrees, obstacle crossing height 2 cm, ditch width 2 cm, climbing angle 7 degrees
Navigation Method
Laser SLAM autonomous navigation
Battery Capacity
40 Ah
Charging Time
6 h
Endurance
8 h